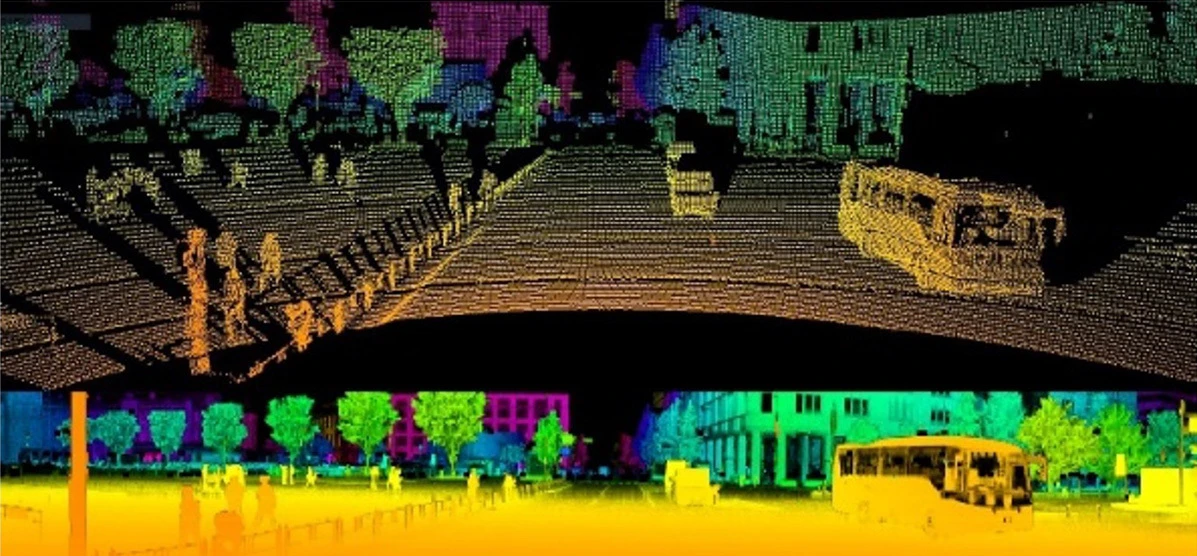
The Automotive Light Detection and Ranging(LiDAR), which can accurately detect and recognize road conditions and the positions and shapes of objects such as vehicles and pedestrians, is a technology that is becoming increasingly important for the spread of Advanced Driver Assistance Systems (ADAS) and the realization of Automated Driving.
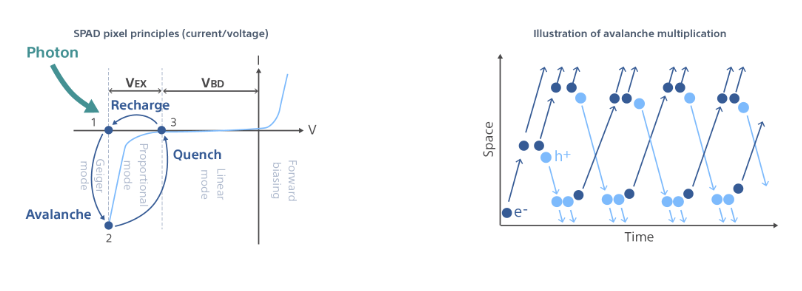
A Single Photon Avalanche Diode(SPAD) is a pixel structure that uses “avalanche multiplication” to multiply electrons from a single incident photon, like a real world avalanche . It allows detection even when the incident light is weak. Distance measurement over long distances and with high accuracy are made possible by using this structure as the light receiving element in the SPAD ToF depth sensor. This sensor measures the distance to an object by detecting the Time of Flight (time difference )of a signal emitted from a light source until it returns to the image sensor, after being reflected by an object.
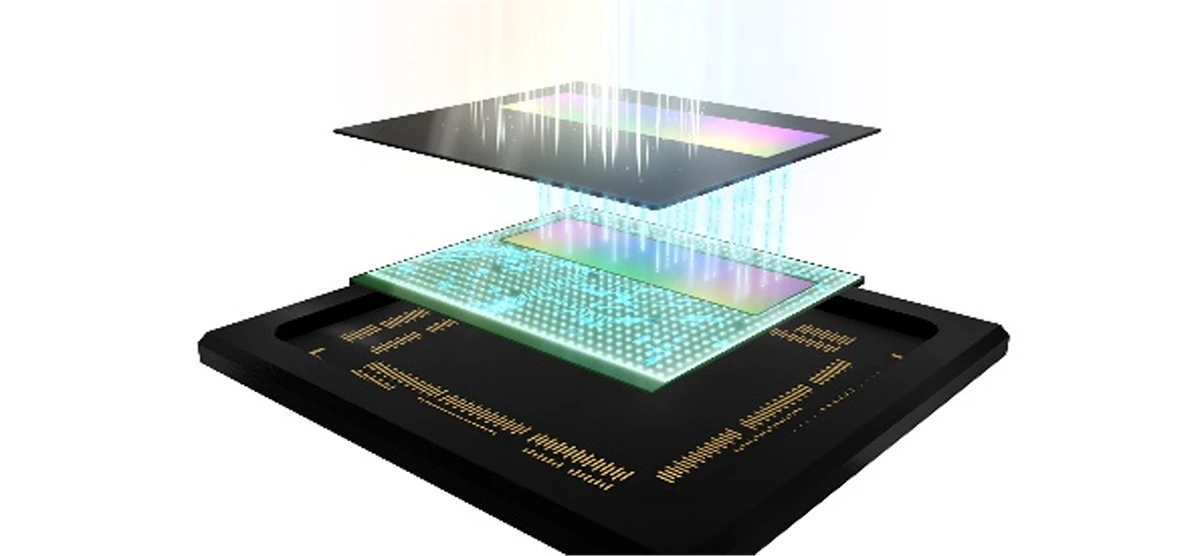
Technologies that Sony Semiconductor Solutions Corporation has nurtured in CMOS image sensor development such as the back-illuminated structure, stacked structure, and Cu-Cu (copper-copper) connection*1 have been utilized in this product, to include the SPAD pixel and distance processing circuits in a single chip, realizing high resolution in a compact size. This allows this product a highly accurate and rapid measurement of a distance of up to 300 m at 15 cm range resolutions*2. The product also contributes to improved reliability for the difficult requirements for automotive applications, such as for various temperature environments and weather, etc..The inclusion in a single chip also contributes to the reduction of costs for LiDAR.
*1) A technology used when a pixel chip (top) is stacked with a logic chip (bottom), to achieve electrical continuity by connecting the Cu (copper) pads to each other. This increases the freedom in the design, improves productivity, and enables a smaller size and higher performance compared with Through-Silicon Vias(TSV), where the upper and lower chips are connected by through electrodes around the circumference of the pixel area.
*2) When measuring an object with a height of 1 m and reflectance of 10% in cloudy daytime conditions with 6 pixels (H) x 6 pixels (V) in additive mode.